اسپید کنترلرها چگونه کار میکنند؟
کنترلکننده الکترونیکی سرعت (ESC) یک بخش حیاتی در سختافزار سیستم محرکه الکتریکی محسوب می شود. به عبارتی این بخش از سیستم مانند مغز عمل می کند، اینگونه که بر اساس سیگنال های دریافتی از اهرم های گاز بر روی کنترل دستگاه، میزان سرعت گیری سیستم را تعیین می کند.
در سیستم های کوچکی مانند پهپادها یا وسایل نقلیه آرسی، این بخش با عنوان ESC شناخته می شود، در حالیکه در سیستم های پیچیده و بزرگ تر به آن واحد کنترل الکترونیک، مبدل (Inverter)، یا کنترل گر موتور نیز می گویند.
مکانیسم درون ESC و همچنین نوع رفتار آن با باتری و موتور بسیار جذاب است. در این مقاله به اصول نحوه کار ESC ها، نحوه استفاده از آنها در کنترل موتورهای براشلس و پهپادها خواهیم پرداخت.
اسپید کنترلرها (ESC) چگونه کار می کند؟
نقش ESC این است که به عنوان واسطه بین باتری و موتور الکتریکی عمل کند. کنترلکننده الکترونیکی سرعت چرخش موتور را با ارسال سیگنال های الکتریکی زمان بندی شده که در نهایت به تغییرات سرعت منجر می شود، کنترل می کند. برای این کار این سیستم از جریان مستقیم باتری کوپل شده با سیستم سوئیچ استفاده می کند تا به یک جریان سه فاز متغیر دست یابد و آن را به موتور بفرستد.
از اهرم گاز بر روی کنترل برای تغییر سرعت موتور استفاده می شود. بیشتر کردن گاز قدرت خروجی را افزایش و سرعت باز و بسته شدن سوئیچ ها در مدار ESC را تغییر می دهد.
اجزای ESC
در داخل ESC اجزای مهمی از جمله میکروکنترلر، راه انداز گیت (gate driver) و ماسفت ها ( MOSFET) (شکل 3) و همچنین مدار حذف کننده باتری و در برخی موارد آداپتور وجود دارد.
میکروکنترلر
میکروکنترلر سه نقش کلیدی را در ESC ایفا می کند.
- سیگنال را از کنترل دریافت کرده و آن را به حلقه کنترل میفرستد.
- موقعیت موتور رابه منظور اطمینان از یک شتاب نرم و ایمن دنبال می کند.
- ارسال پالس ها به درایور گیت برای رسیدن به دستور مطلوب
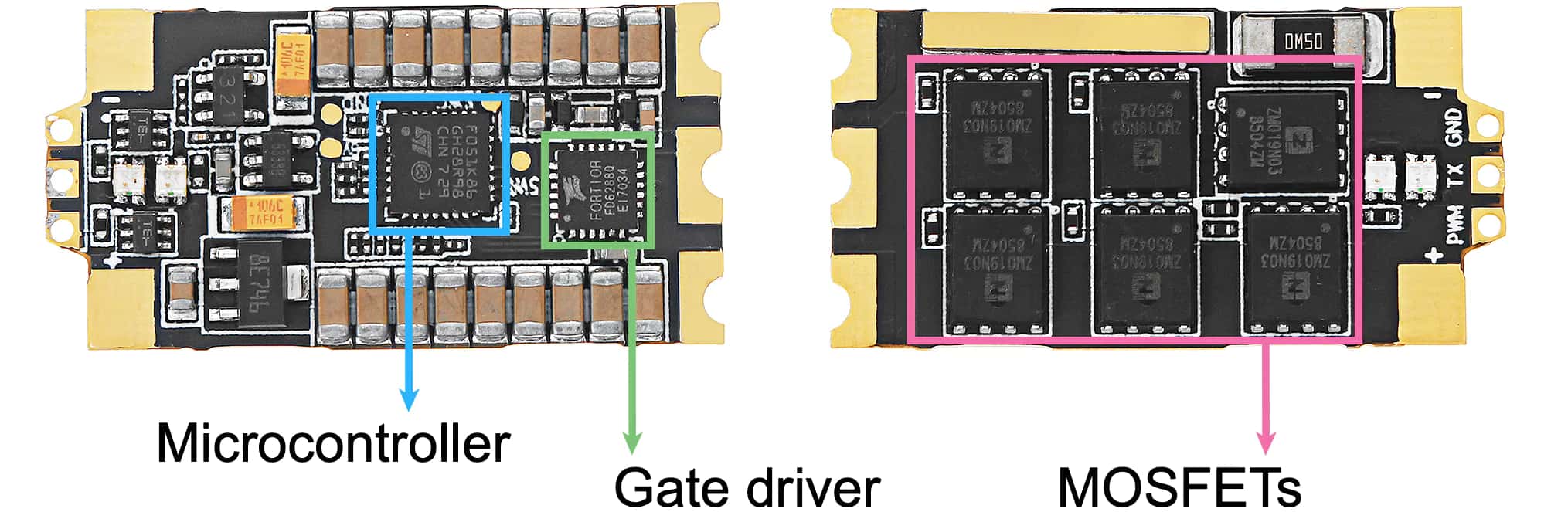
راه انداز گیت (gate driver)
وظیفه راه انداز گیت (gate driver) این است که به عنوان واسطه بین کنترلر و ماسفت ها عمل کند. در صورت دریافت سیگنال ولتاژ پایین از میکروکنترلر، درایور گیت سیگنال را تقویت کرده و سیگنالی با ولتاژ بالا به ماسفت ها می دهد. از طرفی درایور مقاومت کمتری نسبت به میکروکنترلر دارد، بنابراین می تواند جریان بالاتری را عبور دهد که این مسئله نیز سرعت سیگنال را تقویت می کند. تمام اینها باعث می شود تا سوئیچینگ سریع تر و در ادامه تولید حرارت کمتری را شاهد باشیم.
ماسفت
ترانزيستور اثر ميدان فلز- نيمه هادي یا ماسفت کلیدهایی هستند که نیرو را به موتور منتقل می کنند. ESC دارای شش عدد از این ترانزیستورها است و هر سیم از موتور به دو عدد از آنها متصل است. ماسفتها سیگنالهایی را از میکروکنترلر دریافت میکنند و سپس برق را به موتور میرسانند به طوری که هر یک از سیمپیچهای آن در یکی از این سه فاز هستند: ولتاژ بالا، ولتاژ پایین، یا خاموش/زمین.

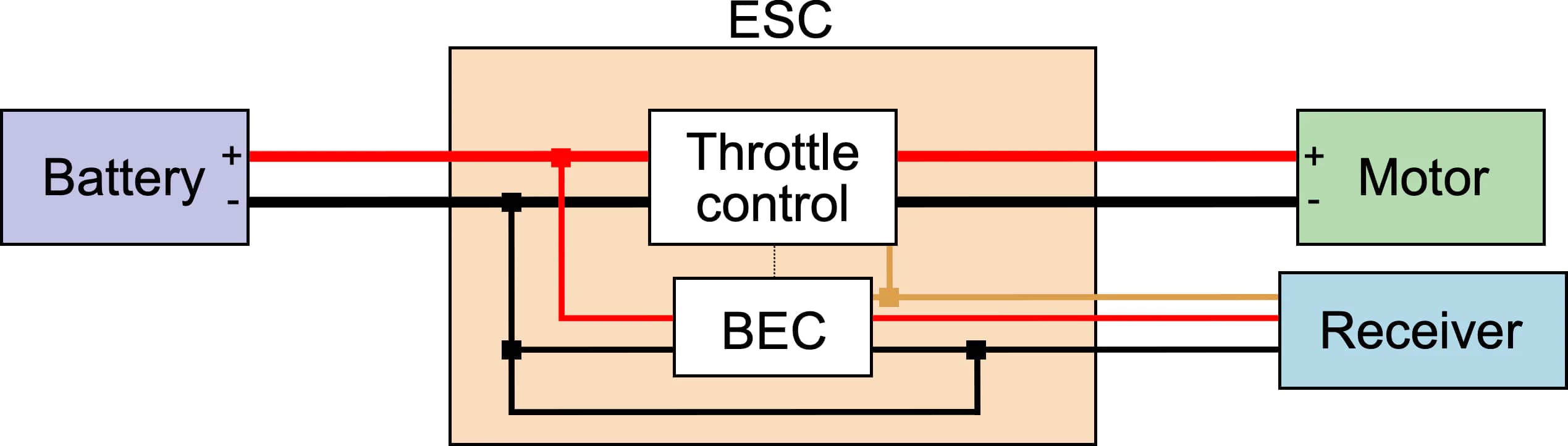
مدار حذف کننده باتری
ESC ها اغلب دارای یک مدار حذف کننده باتری داخلی (BEC) هستند که نیاز به باتری را برطرف نمی کند، اما به عنوان یک تنظیم کننده ولتاژ عمل می کند تا نیاز به باتری جداگانه برای تجهیزات الکترونیکی داخلی را از بین ببرد. برقی که از BEC عبور میکند به ولتاژ کمتر، معمولاً 5 ولت، کاهش مییابد تا به طور ایمن گیرنده اهرم گاز و سایر تجهیزات موجود در برد را تغذیه کند.
اداپتور مدیریت دستگاه (DMA)
آداپتور مدیریت دستگاه (DMA) به کاربر این امکان را می دهد تا ESC را به رایانه خود متصل و نسخه به روز شده آن را دانلود کند و یا از گزینه های برنامه نویسی پیشرفته برای سفارشی سازی دستگاه خود استفاده کند. البته این بخش ممکن است در تمام ESC ها وجود نداشته باشد.
ESC در موتورهای براشلس
همانطور که گفته شد، نقش ESC این است که نیرو را از باتری به موتور به روشی کنترل شده تحویل دهد. برای مثال اگر اهرم گاز را بر روی کنترلر 50٪ فشار دهید، ESC نیز به میزان 50 درصد “نیرو” به موتور می دهد. منظور از نیرو چیست؟
منظور از نیرو ولتاژ متوسط ارسال شده به موتور یا سرعت یا ترکیبی از این دو است.
در یک سمت، ESC دو سیم برای اتصال به باتری دارد، یک سیم قرمز (مثبت) و یک سیم سیاه (منفی). در طرف دیگر سه سیم وجود دارد که ESC را به موتور براشلس متصل می کند. اگر موتور پس از اتصال به ESC در جهت اشتباه بچرخد، تعویض هر دو سیم باعث می شود که در جهت درست بچرخد.
در داخل موتور براشلس دو جزء وجود دارد: روتور (حاوی آهنرباهای دائمی) و استاتور (حاوی سیم پیچ های مس). در صورت ورود جریان به سیم پیچ استاتور ، این جزء به یک آهنربای الکتریکی تبدیل می شود و قطب شمال و جنوب در آن ایجاد می شود. هنگامی که قطبیت آهنربای الکترومغناطیس با آهنربای دائمی که روبروی آن است مطابقت داشته باشد، قطب های مشابه آنها همدیگر را دفع کرده و در نتیجه روتور می چرخد. جریان توسط ESC به شکل یک سیگنال سه فاز تامین می شود که به طور مداوم قطبیت آهنرباهای الکتریکی را تغییر می دهد، به این ترتیب روتور به چرخش خود ادامه می دهد.
برای شروع این فرآیند، ESC باید موقعیت روتور را بداند تا بتواند انتخاب کند کدام آهنرباهای الکتریکی را فعال کند. برای تعیین موقعیت خود در موتورهای حسگر، ESC از سنسورهای اثر هال (Hall Effect) استفاده می کند. این اطلاعات برای همگام سازی دقیق خروجی فاز با زاویه روتور به منظور اطمینان از یک شتاب ملایم و نرم استفاده می شود. در موتورهای بدون سنسور، که بیشتر در وسایل نقلیه هوایی بدون سرنشین (UAVs) استفاده می شود، فرآیند استارت اندکی متفاوت است. در این حالت ESC یک توالی از پیش تعیین شده به موتور می فرستد تا آن را روشن کند. به محض اینکه موتور به سرعت کافی برسد، نیروی الکترومغناطیسی پشتی (EMF پشتی) برای ESC کافی خواهد بود تا تخمین موقعیت دقیق را بدست آورد و پالس ها را همگام کند.
ESC در پهپادها + نحوه انتخاب ESC
انتخاب ESC بخش مهمی از فرآیند طراحی پهپاد است. اطمینان از اینکه باتری شما بیش از حد تخلیه نشود، نیاز به در نظر گرفتن فاکتورهایی دارد که در ادامه به آنها خواهیم پرداخت:
جریان ESC
نرخ جریان ESC باید 10 تا 20 درصد بیشتر از نرخ جریان موتور باشد. این کار از داغ شدن بیش از حد آن جلوگیری کرده و در هنگام کار با حداکثر گاز، تا حدودی فضای تکان خوردن برای آن فراهم می کند. از آنجایی که حرارت یک محدودیت اصلی محسوب می شود، ESC باید در شرایطی مشابه پرواز آزمایش شود. دمای بالا و گردش هوای پایین باعث کاهش نرخ کاری ESC و عمر کاری آن می شود. بعضی از ESC ها دارای دو نوع جریان هستند: جریان پیوسته و انفجاری. جریان یوسته برای دوره های زمانی بلند مدت و جریان انفجاری برای دوره زمانی کوتاه.
ولتاژ ESC
حداکثر ولتاژ در یک ESC محدود است و معمولا یک محدوده ولتاژ یا محدوده سلول برای آن تعریف می شود. به عنوان مثال، یک ESC برای سلول های 3S – 8S از ولتاژ 11.1 تا 33.6 ولت پشتیبانی می کند. ESC این امکان را به شما میدهد تا ولتاژ خاموشی تنظیم کنید، در این حالت در صورت کاهش ولتاژ باتری (3.0 – 3.4 ولت در هر سلول) به شما هشدار می دهد تا از آسیب رساندن به باتری جلوگیری شود. این سیستم ها قطع ولتاژ پایین (LVC) نامیده می شوند و حداکثر توانی را که ESC می تواند فراهم کند، کاهش می دهند. در نتیجه ESC موتور را خاموش می کند.
ESC چهار در یک در کوادکوپترها
هنگام سیم کشی ESC ها به یک کوادکوپتر، می توانید یک ESC برای هر موتور داشته باشید یا از یک ESC چهار در یک با یک برد و چهار کانکتور موتور استفاده کنید (شکل 10). در صورتی که موتورها توان مصرفی بالایی داشته باشند، داشتن چهار ECS میتواند به پخش بار گرمایی کمک کند، اما یک ESC چهار در یک یک گزینه عالی برای صرفهجویی در فضا و محدودیت وزنی است.
نتیجه گیری
در این مقاله به اصول اولیه ESC پرداخته شد: نحوه کار آنها، اجزای کلیدی، نحوه کار آنها در موتورهای براشلس و پهپادها. داشتن درک خوب از این جزء ضروری هواپیماهای بدون سرنشین می تواند به شما کمک کند تا در ساخت پهپادها با دانش بیشتر و دقت بالاتری اقدام کنید.
